无人驾驶不是指日可待,而是非常遥远;我们了解生活的真相,我们仍然热爱生活。

无人驾驶是百年汽车工业的一个崭新高度,也是人们对智慧出行梦寐以求的目标。
今年以来,从拉斯维加斯电子商品展上各种无人驾驶技术的高调亮相,到许多汽车和科技公司陆续对无人驾驶商业计划的激进宣示,一些媒体开始大肆宣称无人驾驶会比人们想象的时间更早到来。
当前社会上和业界弥漫着一种浮躁,似乎无人驾驶就在眼前,谁不抓住它就会被淘汰,造成了资本市场的压力和业界的普遍焦虑。
无人驾驶真的指日可待了吗?
我的回答非常简单:否。不仅否,还非常遥远。
主观能动性是无人驾驶的必要条件
要问为什么,首先要了解什么是无人驾驶和我们需要怎么样的无人驾驶。
无人驾驶位于汽车自动驾驶技术的顶端。按照美国自动车工程学会(SAE)对自动驾驶的五级分类,第一级至第三级为有人的自动驾驶,或称为辅助自动驾驶,即人仍然要为驾驶的最后决策负责。在这些阶段,所有自动驾驶技术的应用只是为了提高人们的驾驶体验,尤其是安全体验。
第四级和第五级为无人自动驾驶,即可以将人完全排除在驾驶决策之外,其中第四级为有限场景、第五级为无限场景下的无人驾驶。显然,第四级和第五级是真正意义上的无人驾驶。
本文所探讨的无人驾驶是指以人类出行为目的的第四级和第五级汽车自动驾驶。
第四级无人驾驶可以在某些特定的场景下较快地实现,但它不会对汽车工业产生颠覆性的改变,这是因为大多数人都不会去买一辆只能在规定道路上或规定区域内行驶的无人驾驶汽车。

追求自由是人的天性,正如美国交通部部长赵小兰女士年初在底特律车展上所说:我们热爱汽车,因为我们热爱自由。限制自由的无人驾驶汽车可能只是公共交通的延伸,不会取代今天面向个人拥有汽车的巨大市场。
要实现无限场景下的无人驾驶,安全即是初衷,也是最大的障碍。我们必须明白汽车是一件非常独特的产品——它量大面广并涉及人们必要的日常出行,而更重要的是它与人的生命安全息息相关。发展无人驾驶技术的首要目的是提高其安全性。
由于汽车驾驶过程中每个场景都不会重复而且复杂多变,在高速行驶中稍有差错就有付出生命代价的可能,所以要求无人驾驶必须具备类似人类合格驾驶员那样能够凭主观意识举一反三的主观能动性——这并不是哲学意义上的主观能动性,而是指无人驾驶在遇到任何不熟悉或突发场景时都能够主动地做出正确的判断和操作,而且可以比人做得更好,从而取得高于人类驾驶的安全性。
在我们目前所处的交通环境中,一辆没有主观能动性的无人驾驶汽车无疑是巨大的安全隐患,有违无人驾驶安全第一的原则。
为了降低甚至替代无人驾驶对主观能动性的依赖,人们想象了一种理想化的情景:厘米级别的高精地图覆盖所有汽车可以到达的地方;道路上的每一辆汽车都具备车对车、车对系统的智能互联以避免可能发生的碰撞;而且还具备行人与车分离的客观条件。
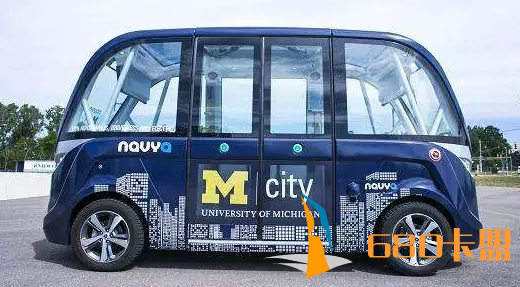
在这种情况下,无人驾驶汽车即使不完全具备主观能动性,也能在预定的道路上安全地自动驾驶,犹如今天智能制造工厂中广泛应用的全自动运输机(AGV)一样。
目前某些接近这种条件的应用场景正在出现,以期在较短的时间内实现第四级别有限场景下的无人驾驶。但是,要使所有场景满足这些条件显然是一项涉及整个社会生存空间变革浩瀚而巨大的工程,绝非一家或几家企业甚至一个产业能够完成,在可见的未来几乎不会成为现实。
因此,主观能动性是无人驾驶的必要条件。没有主观能动性的无人驾驶,是对科学的不尊重,是对生命的轻视,是对社会的不负责任。
主观能动性条件尚未成熟
如何才能实现主观能动下的无人驾驶?路径可能有很多,但目前广为采用并寄予厚望的是人工智能技术。
什么是人工智能?简单地说,就是用人造的机器(比如计算机)来实现人的感知和决策功能。人工智能技术经过半个多世纪的发展,从早期的语言文字处理到今天的图像语音识别,已经有了长足的进步。尤其是近年来,基于机器学习的人工智能技术有了突破性进展,为我们生活的许多方面带来了极大的方便,如医疗、家居、娱乐、制造、服务等。
然而,当前的人工智能技术仍然处于初始的阶段,还不具备支撑无人驾驶所需要的主观能动性的能力。
要想了解这一点,我们不妨将人的智能分为三个层次:1)感性;2)理性:3)灵性。
感性即通过类似条件反射那样获得的信息和知识,如被电炉烫了一次就不会再去触摸电炉;
理性即通过人的逻辑思维得出的知识,如做出如果电源关闭就可以清洗电炉这样的逻辑判断;